NVIDIA introduces Halos OS, a safety-certified operating system for robotaxis, emphasizing built-in safety through certified foundations, standardized interfaces, and industry collaborations.
<div id="bsf_rt_marker"></div><p><span style="font-weight: 400;">A car pulls up to the curb. The app says, “Your ride is here.” No one’s in the driver’s seat. For people who live in one of the dozens of cities now hosting </span><a target="_blank" href="https://www.nvidia.com/en-us/glossary/robotaxi/"><span style="font-weight: 400;">robotaxi</span></a><span style="font-weight: 400;"> services, this is already a reality.</span></p>
<p><span style="font-weight: 400;">The robotaxi industry has moved from prototype milestones to commercial operations, with an expanding ecosystem accelerating the pace of deployment. New</span><a target="_blank" href="https://nvidianews.nvidia.com/news/nvidia-drive-hyperion-becomes-the-global-platform-for-a-robotaxi-ready-world"> <span style="font-weight: 400;">collaborations announced at NVIDIA GTC Taipei</span></a><span style="font-weight: 400;"> reflect robotaxi programs spinning up around the world:</span></p>
<ul>
<li><span style="font-weight: 400;">Uber and Autobrains are launching a robotaxi program in Munich on the </span><a target="_blank" href="https://www.nvidia.com/en-us/solutions/autonomous-vehicles/drive-hyperion/"><span style="font-weight: 400;">NVIDIA DRIVE Hyperion</span></a><span style="font-weight: 400;"> platform, using Autobrains’ agentic AI to support scalable operations. </span></li>
<li><span style="font-weight: 400;">Foxconn is expanding its collaboration with NVIDIA to deploy robotaxi fleets, combining its services with NVIDIA DRIVE Hyperion for rapid integration and scaling in Taiwan.</span></li>
<li><span style="font-weight: 400;">VinFast is working with Autobrains to bring level 4 vehicles built on DRIVE Hyperion to the Southeast Asia market.</span></li>
<li><span style="font-weight: 400;">HUMAIN is working to bring DRIVE Hyperion-powered robotaxis to Saudi Arabia, expanding the platform’s global footprint into the Middle East.</span></li>
</ul>
<p><a href="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1.jpg"><img fetchpriority="high" decoding="async" class="aligncenter size-full wp-image-94348" src="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1.jpg" alt="" width="1280" height="680" srcset="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1.jpg 1280w, https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1-960x510.jpg 960w, https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1-630x335.jpg 630w" sizes="(max-width: 1280px) 100vw, 1280px" /></a></p>
<h2><strong>Building a Safe Software Foundation</strong></h2>
<p><span style="font-weight: 400;">As the robotaxi industry scales, safety is paramount.</span></p>
<p><span style="font-weight: 400;">Regulators, certification bodies and developers are scrutinizing what safe deployment at scale requires. </span></p>
<p><span style="font-weight: 400;">Industry discussion on </span><a href="https://blogs.nvidia.com/blog/level-4-autonomous-driving-ai/"><span style="font-weight: 400;">level 4</span></a><span style="font-weight: 400;"> autonomy often centers on what the vehicle can perceive and decide. </span></p>
<p><span style="font-weight: 400;">That discussion is well-founded. Accurate perception, sound decision-making and handling the unexpected are difficult problems, and real progress toward solving them is being made.</span></p>
<p><span style="font-weight: 400;">But perception and decisions alone are not the whole story. Regulators require something more: proof that the overall system behaves reliably, isolates faults before they escalate and never operates outside the boundaries it was designed for. </span></p>
<p><span style="font-weight: 400;">Robotaxi safety requires solving four distinct challenges simultaneously:</span></p>
<ul>
<li><span style="font-weight: 400;">A safety-certifiable operating system</span></li>
<li><span style="font-weight: 400;">Safe, standardized hardware and software interfaces</span></li>
<li><span style="font-weight: 400;">AI that operates within verifiable guardrails</span></li>
<li><span style="font-weight: 400;">Validation at scale before vehicles touch public roads</span></li>
</ul>
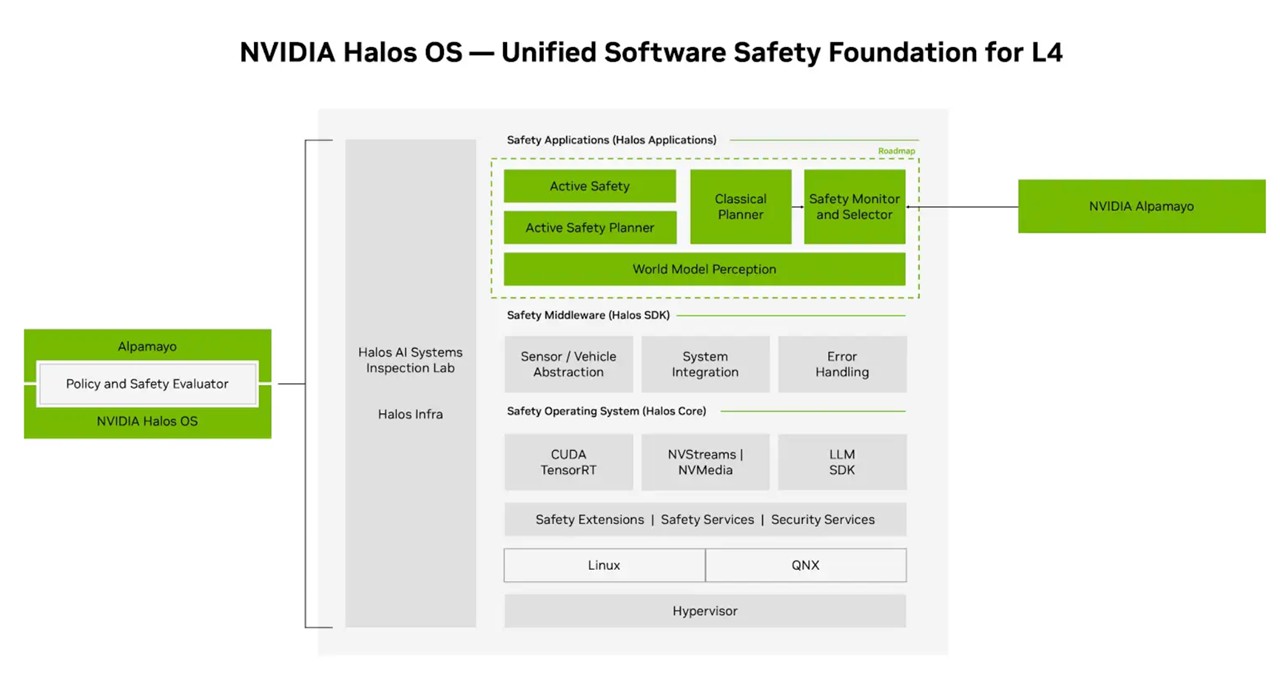
<p><span style="font-weight: 400;">To help solve these challenges, the recently introduced Halos Operating System (OS) — a component of the NVIDIA Halos full-stack, comprehensive safety system — offers a unified, production-ready safety foundation for AI-driven vehicles, built on NVIDIA DRIVE Hyperion. It comprises: </span></p>
<h3><b>Halos Core: A Certified OS Foundation</b></h3>
<p><span style="font-weight: 400;">At the foundation of NVIDIA Halos OS is Halos Core, which is the next generation of NVIDIA DriveOS and certified to automotive safety standards. It’s audited, documented and proven to behave predictably under fault conditions, with a hypervisor — a specialized software layer — that isolates safety-critical functions so failures can’t reach vehicle controls. </span></p>
<p><span style="font-weight: 400;">Halos Core is compliant with </span><a target="_blank" href="https://www.iso.org/standard/68383.html"><span style="font-weight: 400;">ISO 26262</span></a><span style="font-weight: 400;"> ASIL D, includes safety-certified support for NVIDIA CUDA and TensorRT, and provides the TensorRT Edge-LLM open source framework for high-performance large language model inference.</span></p>
<h3><b>Halos SDK: Standardized and Safe Interfaces</b></h3>
<p><span style="font-weight: 400;">A robotaxi integrates cameras, radar, lidar and other sensors, each streaming data in a different format at a different rate. Without a standardized middleware layer, every hardware change forces teams to manually rebuild those integrations. </span></p>
<p><span style="font-weight: 400;">Halos SDK removes that burden. Its sensor abstraction layer decouples the autonomous driving stack from individual sensor drivers, so adding or swapping a sensor no longer causes ripples through application code, while a vehicle abstraction layer connects the autonomous driving stack to the rest of the vehicle through a single, consistent interface. </span></p>
<p><span style="font-weight: 400;">On top, Halos SDK provides the runtime building blocks that safety-critical software demands: a deterministic application-level scheduler for predictable timing, zero-copy inter-process communication that moves data without added latency, a comprehensive system error-handling framework and a robust scenario data recorder — delivering the foundation for highly reliable and low-latency automotive applications. </span></p>
<h3><b>Halos Applications: Safety Guardrails for AI</b></h3>
<p><span style="font-weight: 400;">AI models can match human driving behavior, but regulators require more than performance. </span></p>
<p><span style="font-weight: 400;">The Halos Applications layer provides safety guardrails for AI through deterministic, rule-based functions, analyzed and designed to behave within defined bounds. It includes </span><a target="_blank" href="https://www.nvidia.com/en-us/glossary/world-models/"><span style="font-weight: 400;">world model</span></a><span style="font-weight: 400;"> perception and the </span><a href="https://blogs.nvidia.com/blog/drive-av-mercedes-benz-cla-euro-ncap-safety-award/"><span style="font-weight: 400;">top-rated NVIDIA DRIVE active safety stack</span></a><span style="font-weight: 400;"> featuring automatic emergency braking, lane departure warning, blind spot monitoring, collision warning and more. </span></p>
<p><span style="font-weight: 400;">In addition, in Halos Applications, Halos OS can be combined with end-to-end AI models for which explainability and transparency are essential. This includes the NVIDIA Alpamayo family of open models for autonomous vehicle development, which enables chain-of-thought reasoning, continuously evaluating the road, planning next steps and adapting to changing conditions.</span></p>
<p><a href="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2.jpg"><img decoding="async" class="aligncenter size-full wp-image-94351" src="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2.jpg" alt="" width="1280" height="680" srcset="https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2.jpg 1280w, https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2-960x510.jpg 960w, https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2-630x335.jpg 630w" sizes="(max-width: 1280px) 100vw, 1280px" /></a></p>
<h3><b>The Halos Safety Evaluation Framework</b></h3>
<p><span style="font-weight: 400;">Halos Infra is the cloud-side development infrastructure that enables autonomous vehicle training, simulation and validation at scale. It’s the foundation for the recently released </span><a target="_blank" href="https://docs.nvidia.com/common/resources/Nvidia_Halos_Safety_Evaluation_Framework_Tech_Brief.pdf"><span style="font-weight: 400;">NVIDIA Halos Safety Evaluation Framework</span></a><span style="font-weight: 400;"> (SEF).</span></p>
<p><span style="font-weight: 400;">SEF provides the tools and guidelines needed to build a credible safety case, from L2 driver assistance to L4 robotaxis. It draws on more than 330 research papers and 1,000 patents developed within NVIDIA Halos OS.</span></p>
<p><span style="font-weight: 400;">Halos Infra runs on NVIDIA’s three-computer autonomous driving solution: </span></p>
<ul>
<li><a target="_blank" href="https://www.nvidia.com/en-us/data-center/dgx-platform/"><span style="font-weight: 400;">NVIDIA DGX</span></a><span style="font-weight: 400;"> systems for training the AI stack in the data center</span></li>
<li><a target="_blank" href="https://www.nvidia.com/en-us/omniverse/"><span style="font-weight: 400;">NVIDIA Omniverse</span></a><span style="font-weight: 400;"> on</span><a target="_blank" href="https://www.nvidia.com/en-us/data-center/products/ovx/"> <span style="font-weight: 400;">NVIDIA OVX</span></a><span style="font-weight: 400;"> systems for simulation and synthetic data generation</span></li>
<li><span style="font-weight: 400;">The</span><a target="_blank" href="https://www.nvidia.com/en-au/self-driving-cars/in-vehicle-computing/"> <span style="font-weight: 400;">NVIDIA AGX</span></a><span style="font-weight: 400;"> in-vehicle computer for real-time sensor processing and safety</span></li>
</ul>
<p><span style="font-weight: 400;">Halos OS spans the full development lifecycle — from training and simulation in Halos Infra to inference in the vehicle itself.</span></p>
<p><i><span style="font-weight: 400;">Learn more about </span></i><a target="_blank" href="https://www.nvidia.com/en-us/ai-trust-center/halos/autonomous-vehicles/"><i><span style="font-weight: 400;">NVIDIA Halos</span></i></a><i><span style="font-weight: 400;">.</span></i></p>
# For Robotaxis, Safety Must Be Built In, Not Bolted On
Source: [https://blogs.nvidia.com/blog/halos-os-robotaxi-safety/](https://blogs.nvidia.com/blog/halos-os-robotaxi-safety/)
A car pulls up to the curb\. The app says, “Your ride is here\.” No one’s in the driver’s seat\. For people who live in one of the dozens of cities now hosting[robotaxi](https://www.nvidia.com/en-us/glossary/robotaxi/)services, this is already a reality\.
The robotaxi industry has moved from prototype milestones to commercial operations, with an expanding ecosystem accelerating the pace of deployment\. New[collaborations announced at NVIDIA GTC Taipei](https://nvidianews.nvidia.com/news/nvidia-drive-hyperion-becomes-the-global-platform-for-a-robotaxi-ready-world)reflect robotaxi programs spinning up around the world:
- Uber and Autobrains are launching a robotaxi program in Munich on the[NVIDIA DRIVE Hyperion](https://www.nvidia.com/en-us/solutions/autonomous-vehicles/drive-hyperion/)platform, using Autobrains’ agentic AI to support scalable operations\.
- Foxconn is expanding its collaboration with NVIDIA to deploy robotaxi fleets, combining its services with NVIDIA DRIVE Hyperion for rapid integration and scaling in Taiwan\.
- VinFast is working with Autobrains to bring level 4 vehicles built on DRIVE Hyperion to the Southeast Asia market\.
- HUMAIN is working to bring DRIVE Hyperion\-powered robotaxis to Saudi Arabia, expanding the platform’s global footprint into the Middle East\.
[](https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-1.jpg)
## **Building a Safe Software Foundation**
As the robotaxi industry scales, safety is paramount\.
Regulators, certification bodies and developers are scrutinizing what safe deployment at scale requires\.
Industry discussion on[level 4](https://blogs.nvidia.com/blog/level-4-autonomous-driving-ai/)autonomy often centers on what the vehicle can perceive and decide\.
That discussion is well\-founded\. Accurate perception, sound decision\-making and handling the unexpected are difficult problems, and real progress toward solving them is being made\.
But perception and decisions alone are not the whole story\. Regulators require something more: proof that the overall system behaves reliably, isolates faults before they escalate and never operates outside the boundaries it was designed for\.
Robotaxi safety requires solving four distinct challenges simultaneously:
- A safety\-certifiable operating system
- Safe, standardized hardware and software interfaces
- AI that operates within verifiable guardrails
- Validation at scale before vehicles touch public roads
To help solve these challenges, the recently introduced Halos Operating System \(OS\) — a component of the NVIDIA Halos full\-stack, comprehensive safety system — offers a unified, production\-ready safety foundation for AI\-driven vehicles, built on NVIDIA DRIVE Hyperion\. It comprises:
### **Halos Core: A Certified OS Foundation**
At the foundation of NVIDIA Halos OS is Halos Core, which is the next generation of NVIDIA DriveOS and certified to automotive safety standards\. It’s audited, documented and proven to behave predictably under fault conditions, with a hypervisor — a specialized software layer — that isolates safety\-critical functions so failures can’t reach vehicle controls\.
Halos Core is compliant with[ISO 26262](https://www.iso.org/standard/68383.html)ASIL D, includes safety\-certified support for NVIDIA CUDA and TensorRT, and provides the TensorRT Edge\-LLM open source framework for high\-performance large language model inference\.
### **Halos SDK: Standardized and Safe Interfaces**
A robotaxi integrates cameras, radar, lidar and other sensors, each streaming data in a different format at a different rate\. Without a standardized middleware layer, every hardware change forces teams to manually rebuild those integrations\.
Halos SDK removes that burden\. Its sensor abstraction layer decouples the autonomous driving stack from individual sensor drivers, so adding or swapping a sensor no longer causes ripples through application code, while a vehicle abstraction layer connects the autonomous driving stack to the rest of the vehicle through a single, consistent interface\.
On top, Halos SDK provides the runtime building blocks that safety\-critical software demands: a deterministic application\-level scheduler for predictable timing, zero\-copy inter\-process communication that moves data without added latency, a comprehensive system error\-handling framework and a robust scenario data recorder — delivering the foundation for highly reliable and low\-latency automotive applications\.
### **Halos Applications: Safety Guardrails for AI**
AI models can match human driving behavior, but regulators require more than performance\.
The Halos Applications layer provides safety guardrails for AI through deterministic, rule\-based functions, analyzed and designed to behave within defined bounds\. It includes[world model](https://www.nvidia.com/en-us/glossary/world-models/)perception and the[top\-rated NVIDIA DRIVE active safety stack](https://blogs.nvidia.com/blog/drive-av-mercedes-benz-cla-euro-ncap-safety-award/)featuring automatic emergency braking, lane departure warning, blind spot monitoring, collision warning and more\.
In addition, in Halos Applications, Halos OS can be combined with end\-to\-end AI models for which explainability and transparency are essential\. This includes the NVIDIA Alpamayo family of open models for autonomous vehicle development, which enables chain\-of\-thought reasoning, continuously evaluating the road, planning next steps and adapting to changing conditions\.
[](https://blogs.nvidia.com/wp-content/uploads/2026/06/robotaxis_halos_blog-body-2.jpg)
### **The Halos Safety Evaluation Framework**
Halos Infra is the cloud\-side development infrastructure that enables autonomous vehicle training, simulation and validation at scale\. It’s the foundation for the recently released[NVIDIA Halos Safety Evaluation Framework](https://docs.nvidia.com/common/resources/Nvidia_Halos_Safety_Evaluation_Framework_Tech_Brief.pdf)\(SEF\)\.
SEF provides the tools and guidelines needed to build a credible safety case, from L2 driver assistance to L4 robotaxis\. It draws on more than 330 research papers and 1,000 patents developed within NVIDIA Halos OS\.
Halos Infra runs on NVIDIA’s three\-computer autonomous driving solution:
- [NVIDIA DGX](https://www.nvidia.com/en-us/data-center/dgx-platform/)systems for training the AI stack in the data center
- [NVIDIA Omniverse](https://www.nvidia.com/en-us/omniverse/)on[NVIDIA OVX](https://www.nvidia.com/en-us/data-center/products/ovx/)systems for simulation and synthetic data generation
- The[NVIDIA AGX](https://www.nvidia.com/en-au/self-driving-cars/in-vehicle-computing/)in\-vehicle computer for real\-time sensor processing and safety
Halos OS spans the full development lifecycle — from training and simulation in Halos Infra to inference in the vehicle itself\.
*Learn more about*[*NVIDIA Halos*](https://www.nvidia.com/en-us/ai-trust-center/halos/autonomous-vehicles/)*\.*
NVIDIA launches OpenShell, a secure-by-design runtime for autonomous AI agents that isolates agent operations in sandboxes and enforces security policies at the system level rather than relying on behavioral prompts. The toolkit, part of NVIDIA Agent Toolkit, enables enterprises to run coding agents and agentic workflows with unified policy management and compliance oversight.
NVIDIA announces Alpamayo 2 Super, a 32B open reasoning model for Level 4 robotaxis, featuring 360-degree perception, meta-actions, and a full stack including AlpaGym simulation and OmniDreams scenario generation.
NVIDIA releases Nemotron 3.5 Content Safety, a unified multimodal AI safety model that combines multilingual support, custom enterprise policy enforcement, and auditable reasoning (THINK mode) in a single inference call. It builds on the previous Nemotron 3 model by deepening multimodal integration to evaluate text prompts, images, and assistant responses together for more comprehensive safety verdicts.
Tesla revealed two low-speed crashes involving its Robotaxis while teleoperators were remotely driving the vehicles, according to newly unredacted NHTSA data. The incidents occurred in Austin, Texas, with safety monitors onboard and no passengers present.
NVIDIA announces NemoClaw, an open blueprint for building secure, autonomous AI engineers, showcased at GTC Taipei with partnerships from Cadence, Dassault, Siemens, and Synopsys to automate industrial engineering workflows.